- 790
- 产品价格:面议
- 发货地址:山东青岛即墨区 包装说明:不限
- 产品数量:9999.00 台产品规格:不限
- 信息编号:223277061公司编号:3242552
- 冯喜有 经理 微信 155889973..
- 进入店铺 在线咨询 QQ咨询 在线询价
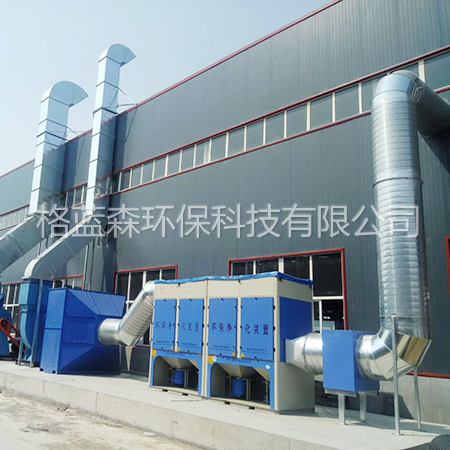
去焊接烟渍 工厂烟尘处理 实体厂家
- 相关产品:
*除尘器净化原理:
含尘气流由侧进口或**进口进入除尘器内,粉尘被滤筒外表“截流”并聚集起来,净化后的气流由滤筒中心部流出排放,达到净化目的。为清洁滤筒,利用压缩空气(0.6-0.7mpa)产生强烈的气流通过电磁阀门释放出来至滤筒中心部,如同振动波一样将滤筒外表面聚集的粉尘振荡及喷吹下来并落到下面的灰斗内。为确保滤筒除尘正常连续动转,由脉冲控制系统进行反吹。对粒径为亚微米以上的粉尘有99%以上的净化效率;
*除尘器可以利用过滤板有效地将直径为0.5—20微米的固态粒子从气流中除去,同时,也能脱除部分气态污染物。它具有结构简单、占地面积小、操作及维修方便和净化**等优点:
*除尘器广泛用于:机械制造、切割、冶金、建材、电力、打砂、化工涂料、建筑、材料、医药生产、电子、木器加工等行业生产所产生的粉尘净化。
目前我公司焊接整体除尘设备收集方式有:
1、焊烟外排
在焊接工作区域的每个工位上方安装有一定长度的吸气臂,使其活动半径*覆盖整个焊接工作区域。
采取负压吸收方式,焊接烟尘通过吸气臂、管路变径等,净化后经过风机高空排放。
这种方式从源头上直接吸走有害焊接烟雾,从而达到保护操作工人的目的。
2、焊烟净化
由格蓝森吸气臂将产烟点收集到的烟尘颗粒吸入焊烟净化主机,经过滤后将洁净的空气排放出去。
主机可置于室内或者室外。
主管道可根据客户需要选用PP或者镀锌螺旋风管。
吸气臂根据客户现场需求采购骨架外置型吸气臂和骨架内置型吸气臂。
3、当焊接工件不大时也可采用上方集尘罩方式进行焊烟收集,收集后的烟尘经过净化主机净化后排出。
目标任务
1. 治理焊接烟尘,**排放符合地区环保标准。
2. 噪声≤85dB(A)。
3. **前期投入及正常运行、保养的经济性。
整套设备***,使用寿命长,操作维护简便
治理区域为6个机器人焊接区,每个焊接区有2台机器人,其焊接转动的幅度为扇形,现只要将加工区域的焊接烟尘进行治理即可,为不影响现场机器人操作及零部件的转运,治理方式选用上部吸气罩进行烟尘治理,其尺寸为2150*1500,为了操作方便及焊接烟尘的捕捉效果,固采用固定式**吸罩的形式进行烟尘捕捉。
捕捉方式 :采用**吸罩+挡弧帘
结合我公司的机器人除尘经验,采用**吸罩配挡弧帘的方式进行烟尘捕捉, **吸罩设置在机器人的正上方,焊接产生的烟尘为了**捕捉效果及避免野风的影响,我们在**吸罩的边缘悬挂一定长度的挡弧帘,这样就在机器人上部区域形成一个半封闭的空间,上升进入的烟尘被局限在此空间,通过**吸罩抽风口*抽走烟尘,由于该区域处于一个负压状态,从而有效的避免的烟尘的扩散,达到集尘的目的。
联系电话是0532-86898229, 主要经营【1分钟前更新】青岛格蓝森环保科技有限公司(dry123.cn.b2b168.com)**从事焊烟除尘器、焊烟除尘设备、焊烟净化设备、打磨除尘设备、车间除尘设备、滤筒除尘器治理工程设计与施工,并提供各种环保设备的设计、生产、销售和安装。我们坚信绿水青山就是金山银山,为坚持可持续发展出一份力,为中国环保事业的发展贡献力量。。
单位注册资金单位注册资金人民币 1000 - 5000 万元。
{kind=link}